Sequence-to-Sequence Prediction of Vehicle Trajectory via LSTM Encoder-Decoder Architecture
Abstract
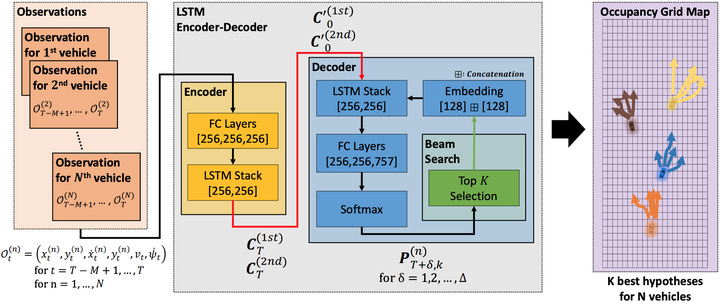
In this paper, we propose a deep learning based vehicle trajectory prediction technique which can generate the future trajectory sequence of surrounding vehicles in real time. We employ the encoder-decoder architecture which analyzes the pattern underlying in the past trajectory using the long short-term memory (LSTM) based encoder and generates the future trajectory sequence using the LSTM based decoder. This structure produces the K most likely trajectory candidates over occupancy grid map by employing the beam search technique which keeps the K locally best candidates from the decoder output. The experiments conducted on highway traffic scenarios show that the prediction accuracy of the proposed method is significantly higher than the conventional trajectory prediction techniques.